
























MEMS-инерциальный измерительный блок MSU204
MSU204 — это высокопроизводительный компактный MEMS-инерциальный измерительный блок с высокой устойчивостью к перегрузкам. Внутри интегрированы трёхосевой гироскоп и трёхосевой акселерометр для измерения угловой скорости и ускорения по трём осям носителя. Кроме того, встроены трёхосевой магнитометр и датчик давления.
Описание
маркер
Технические особенности
Высокая производительность и компактность
MSU204 — это высокопроизводительный компактный MEMS-инерциальный измерительный блок с высокой устойчивостью к перегрузкам. Внутри интегрированы трёхосевой гироскоп и трёхосевой акселерометр для измерения угловой скорости и ускорения по трём осям носителя. Кроме того, встроены трёхосевой магнитометр и датчик давления. Гироскоп и акселерометр проходят коррекцию ошибок (включая температурную компенсацию, компенсацию ошибок неортогональности установки, нелинейную компенсацию и другие) и могут выводить данные по последовательному порту в соответствии с установленным протоколом связи.
Высокое качество и высокая надежность
MSU204 использует высокоточные MEMS-инерциальные компоненты ведущих производителей, обладающие отличной надёжностью и стабильностью. Устройство способно точно измерять угловую скорость и ускорение движущегося объекта в суровых условиях, что делает его широко применимым в таких требовательных областях, как прецизионная навигация, управление и динамические измерения.
Автономная сенсорная система
MTU16488B представляет собой автономную систему датчиков, которая автоматически запускается при подаче питания. После завершения инициализации устройство начинает сбор и обработку данных, а откалиброванные данные сенсоров загружаются в выходные регистры. Доступ к данным осуществляется через интерфейс SPI, который обычно подключается к совместимому порту встроенного процессора, что облегчает интеграцию и управление системой.
Основные характеристики
Трёхосевой цифровой гироскоп, диапазон ±450 °/с
Трёхосевой цифровой акселерометр, диапазон ±16 g
Цифровой датчик давления, диапазон 300 мбар ~ 1200 мбар
Температурная калибровка и компенсация в диапазоне от –40 ℃ до +85 ℃ (гироскоп и акселерометр)
Интерфейс SPI
Встроенный датчик температуры
Компактные размеры, малый вес
Совместимость с ADIS16488A
Области применения
Виброзащита и управление ориентацией промышленного оборудования
Промышленная автоматизация
Управление роботами
Стабилизация и управление платформами
Приборостроение


Благодаря гироскопу с диапазоном ±450 °/с, акселерометру с диапазоном ±16 g и широкодиапазонному цифровому барометру MSU204 способен предоставлять всестороннюю и точную информацию о положении, скорости и высоте. Данный модуль является ключевым компонентом инерциальной навигационной системы. Независимо от сложности условий эксплуатации — будь то беспилотные летательные аппараты, робототехника, промышленная автоматизация или полевые изыскания — устройство работает стабильно, обеспечивая высокоточную навигацию и управление подвижными объектами. MSU204 является идеальным выбором для высокопроизводительных MEMS-инерциальных навигационных систем.
Таблица 1. Технические характеристики инерциального измерительного блока MSU204
| Параметр | Условия испытаний | Мин. | Тип. | Макс. | Единица измерения | ||
| Гироскоп
|
Диапазон измерений | -450 | +450 | °/s | |||
| Нестабильность нулевого смещения | по Аллану | 0.8 | 1 | °/h | |||
| Стабильность нулевого смещения | сглаживание 10 с | 3 | 5 | °/h | |||
| Повторяемость нулевого смещения | постоянная температура | 3 | 5 | °/h | |||
| Нелинейность масштабного коэффициента | 25 | 50 | ppm | ||||
| Угловое случайное блуждание | 0.1 | 0.2 | °/√h | ||||
| Чувствительность к ускорению (g) | 10 | °/h/g | |||||
| Перекрёстная связь | 0.001 | рад | |||||
| Погрешность масштабного коэффициента | 0.1 | %FS | |||||
| Полоса пропускания | 200 | Гц | |||||
| Акселерометр
|
Диапазон измерений | -16 | +16 | g | |||
| Нестабильность нулевого смещения | по Аллану | 0.02 | 0.03 | мг | |||
| Стабильность нулевого смещения | сглаживание 10 с | 0.05 | 0.1 | мг | |||
| Повторяемость нулевого смещения | постоянная температура | 0.05 | 0.1 | мг | |||
| Случайное блуждание скорости | 0.02 | 0.03 | м/с/√ч | ||||
| Нелинейность масштабного коэффициента | 3000 | 5000 | ppm | ||||
| Перекрёстная связь | 0.001 | рад | |||||
| Полоса пропускания | 200 | Гц | |||||
| Магнитометр
|
Диапазон измерения | -8 | +8 | Гс | |||
| Разрешение | 200 | мкГс | |||||
| Спектральная плотность шума | 50 | мкГс | |||||
| Полоса пропускания | 200 | Гц | |||||
| Барометр
|
Диапазон измерения | 300 | 1100 | мбар | |||
| Суммарная погрешность | 4.5 | мбар | |||||
| Абсолютная погрешность | 1.5 | мбар | |||||
| Нелинейность | 0.1 | %FS | |||||
| Разрешение | 0.1 | мбар | |||||
| Интерфейс связи
|
SPI | 10 | МГц | ||||
| UART | 9.6 | 460.8 | 921.6 | кбит/с | |||
| Электрические характеристики
|
Рабочее напряжение | 3.0 | 3.3 | 3.6 | В | ||
|
0.5 | Вт | |||||
| Пульсации | Пик значение | 100 | мВ | ||||
| Конструктивные характеристики
|
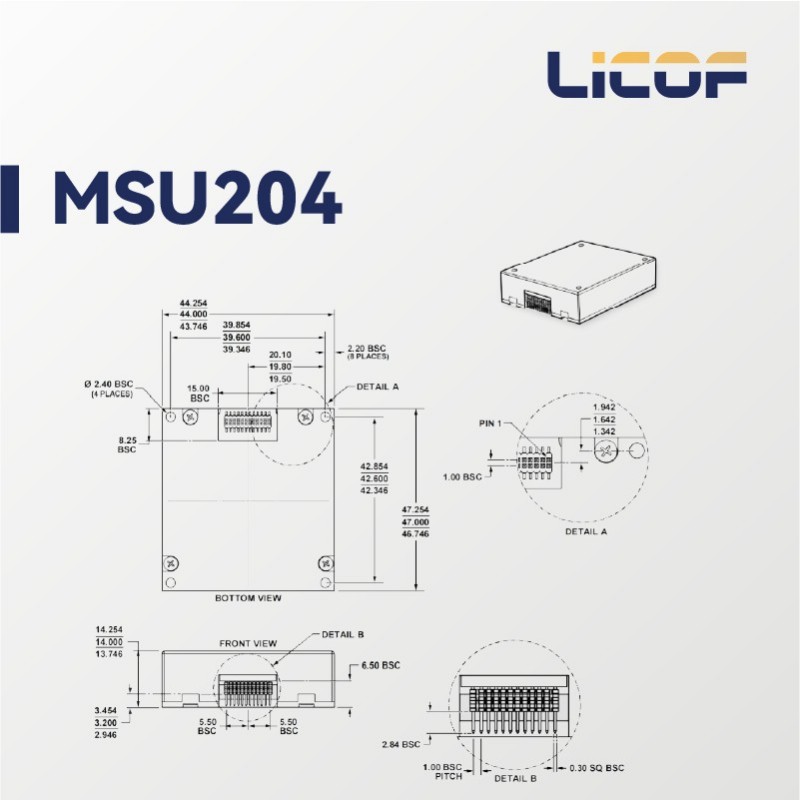
Габаритные размеры | 47.0 × 44.0 ×14.0 | мм | ||||
| Масса | 50 | г | |||||
| Условия эксплуатации | Рабочая температура | -40 | 85 | ℃ | |||
| Температура хранения | -55 | 85 | ℃ | ||||
| Вибрация | 10–2000 Гц, 6,06 g | ||||||
| Ударные нагрузки | 30 g, 11 мс | ||||||
| Перегрузка | Полусинусоидальный импульс | 1000g | |||||
| Надёжность
|
Средняя наработка на отказ (MTBF) | 20000 | ч | ||||
| Время непрерывной работы | 120 | ч | |||||
Рисунок 1. Размеры корпуса

Таблица 2. Определение контактов разъёма инерциального измерительного модуля MSU204
| Контакт | Обозначение | Тип | Описание |
| 10, 11, 12 | VDD | Питание | |
| 13, 14, 15 | GND | Земля питания | |
| 7 | DIO1 | Вход/выход | Универсальный ввод-вывод, настраиваемый |
| 9 | DIO2 | Вход/выход | |
| 1 | DIO3 | Вход/выход | |
| 2 | DIO4 | Вход/выход | |
| 3 | SPI-CLK | Вход | SSPI, режим ведущий/ведомый не настраивается |
| 4 | SPI-MISO | Выход | |
| 5 | SPI-MOSI | Вход | |
| 6 | SPI-CS | Вход | |
| 16 | UART-0-TXD | Выход | UART0, используется только для отладки |
| 17 | UART-0-RXD | Вход | |
| 8 | RST | Вход | Сброс |
| 23 | VDD RTC | Питание | Не используется |
| 22, 24, 18, 19, 20, 21 | NC | Резерв | Не подключено |
связаться с нами
Сопутствующие популярные продукты

MEMS-нефтяной инерциальный измеритель ориентации MSN300
MSN300 MEMS-инерциальный измеритель ориентации использует встроенные высокоточные MEMS-гироскопы и MEMS-акселерометры, реализуя бесплатформенную инерциальную навигационную схему, что позволяет непосредственно измерять азимут, угол наклона и угол крена скважины.

Многофункциональный интегрированный Y-образный волноводный модулятор MIOC
MIOC является ключевым компонентом волоконно-оптического гироскопа замкнутого контура, совмещающим функции поляризатора и анализатора, разделения и объединения пучков, а также электрооптической фазовой модуляции и компенсации.

Многофункциональная платформа для тестирования волоконно-оптических катушек FMTP
Многофункциональная испытательная платформа FMTP для волоконно-оптических катушек интегрирует функции OTDR, тестирования коэффициента экстинкции и обнаружения красного света. Она позволяет в одном цикле провести измерение длины, потерь, перекрёстных помех волоконно-оптической катушки, а также выполнить проверку красным светом.

Одноосевой волоконно-оптический гироскоп FS70
FS70 — это миниатюрный волоконно-оптический гироскоп, принципиально отличающийся от традиционных конструктивных решений. Он использует интегрированное проектирование оптических и электронных цепей, являясь идеальным выбором датчика угловой скорости средней и низкой точности для применения в области управления.

Высокоточная MEMS-комбинированная навигационная система MSI300
MSI300 MEMS-комбинированная навигационная система — это высокоточная, высоконадёжная и экономически эффективная MEMS-инерциальная комбинированная навигационная система, широко применяемая в навигации, управлении и измерениях на таких транспортных средствах, как автомобили, суда и беспилотные летательные аппараты.

Высокоточный MEMS-инерциальный измерительный блок MSU300
MSU300 высокоточный MEMS-инерциальный измерительный блок — это высоконадёжный и экономически эффективный шестиосевой MEMS-инерциальный датчик, который широко применяется в областях, связанных с инерциальной навигацией и стабилизацией ориентации, а также в системах навигации, управления и измерений. MSU300 может быть сконфигурирован по аппаратной и программной части в соответствии с требованиями пользователя.

Оптический модуль волоконно-оптического гироскопа OM60/70/98/120
Оптический модуль волоконно-оптического гироскопа — это модульный компонент, специально разработанный для волоконно-оптического гироскопа и состоящий из волоконно-оптической катушки и MIOC (многофункциональный интегральный оптический чип). Волоконно-оптическая катушка и MIOC соединены вместе и интегрированы в одном корпусе.

Система трёхосевых испытаний волоконно-оптических катушек FCTS1310C/1550C
Система тестирования волоконно-оптических катушек — это трёхосевое высокоточное устройство для измерения смещения нуля гироскопа, которое может использоваться для оценки гироскопических характеристик волоконно-оптических катушек с рабочей длиной волны 1310 нм или 1550 нм.

Многоканальная система тестирования волоконно-оптических гироскопов FOGTS001
Многоканальная система сбора данных гироскопов — это интегрированная программно-аппаратная система, способная одновременно осуществлять сбор и тестирование до 8 волоконно-оптических гироскопов. Вся система состоит из двух частей: аппаратной платы сбора данных и программного обеспечения управляющей системы верхнего уровня.

Высокоточный Промышленный Трехосевой Чиповый Акселерометр
Особенности продукта Высокостабильный 3-осевой MEMS акселерометр Выбираемые диапазоны измерений ...

Машина для намотки волоконно-оптических катушек серии RH
Машина для намотки волоконно-оптических катушек является ключевым оборудованием для изготовления волоконно-оптических катушек, используемых в гироскопах. Наша компания обладает собственными разработками и ключевыми технологиями в этой области.

Кварцевый акселерометр
Кварцевый акселерометр — это высокопроизводительный одноосевой датчик с обратной связью по моменту силы. Он использует передовую кварцевую упругую конструкцию и сервотехнологию с замкнутым контуром, что позволяет точно измерять внешние ускорения и выдавать токовый сигнал, пропорциональный ускорению, с помощью высокоточной демодуляционной схемы.

Высокоточный MEMS-инерциальный измерительный модуль MSU301
MSU301 — это высоконадёжный и экономически эффективный шестиосевой MEMS-инерциальный датчик, который широко применяется в навигации, управлении и измерениях для транспортных средств, судов и беспилотных летательных аппаратов.

Двухосевого волоконно-оптического гироскопа F2X70
F2X70 — это миниатюрный волоконно-оптический гироскоп, который ломает классические принципы традиционного проектирования волоконно-оптических гироскопов. Он использует интегрированную схему и оптическую схему, являясь идеальным выбором в качестве датчика угловой скорости средней и низкой точности в области управления. Устройство широко применяется в различных областях инерциальных измерений и систем управления.

Одноосевой волоконно-оптический гироскоп FS98H
FS98H — это миниатюрный волоконно-оптический гироскоп, принципиально отличающийся от классических принципов традиционного проектирования. Он использует интегрированное проектирование электрических и оптических цепей, что делает его идеальным выбором датчика угловой скорости средней и низкой точности для применения в области управления. Гироскоп широко применяется в различных областях инерциальных измерений и управления.

Оптический приёмный модуль PIN-FET
PIN-FET является приёмным элементом оптического сигнала для волоконно-оптического гироскопа, одним из его оптических компонентов, играющим ключевую роль в обеспечении высокой чувствительности, низкого уровня шума и высокой надёжности.