






















Волоконно-оптическая бесплатформенная инерциальная/спутниковая комбинированная навигационная система FSI400
FSI400 — это высоконадёжная и экономически эффективная навигационная система, широко применяемая в таких областях, как навигация, управление и измерения, на примере самолётов, наземных беспилотных транспортных средств, беспилотных судов и беспилотных летательных аппаратов.
Описание
маркер
Описание продукта
FSI400 — это высоконадёжная и экономически эффективная навигационная система, широко применяемая в таких областях, как навигация, управление и измерения, на примере самолётов, наземных беспилотных транспортных средств, беспилотных судов и беспилотных летательных аппаратов.
Комбинированная навигационная система наследует модульный дизайн аналогичных продуктов, использует высокоточные волоконно-оптические гироскопы замкнутого контура (FOG) и высокоточные акселерометры в сочетании с высокопроизводительной GNSS-платой. Аппаратная часть разработана на архитектуре FPGA+DSP. С помощью алгоритма мультисенсорного слияния система обрабатывает данные: положение и скорость, полученные от GPS, подаются в фильтр, а также положение, скорость и ориентация от INS. Фильтр сравнивает разницу между ними, строит модель ошибки для оценки ошибок INS и корректирует результаты инерциальной навигации, обеспечивая комбинированные данные о скорости, положении и ориентации. Инерциальная навигация поддерживает различные режимы конфигурации, адаптированные под разные носители, например, авиационные, наземные и морские платформы. Для наземных платформ добавляются дорожные ограничения, что посредством оценки и коррекции ошибок обеспечивает длительную высокоточную навигацию и позиционирование носителя.
Основные характеристики
Ключевые компоненты отечественного производства, высокая производительность, модульная конструкция, малый вес
Поддержка GNSS во всех частотных диапазонах, высокая точность позиционирования и ориентирования в сложных условиях
Многочисленные интерфейсы и меры изоляции
Потребляемая мощность в установившемся режиме 18 Вт
Калибровка и компенсация во всём температурном диапазоне от –45 ℃ до +65 ℃
Комбинированные навигационные системы поддерживают автоматическое определение направления на север с точностью лучше 1 мил
Встроенный адаптивный навигационный алгоритм
Области применения
Мобильное измерение ориентации и положения
Наземные беспилотные транспортные средства, беспилотные суда/катера
Геодезия и картография
Системы стабилизации платформ
Подводные аппараты
Связь в движении
Интеллектуальное вождение
Управление снарядами
Интеллектуальные шахты
Уникальная технология
Комбинированная навигационная система интегрирует высокоточные волоконно-оптические гироскопы и акселерометры в единой конструкции. Выбранные гироскопы и акселерометры представляют собой передовые инерциальные приборы, соответствующие ведущему отраслевому уровню. Внутри системы выполнена компенсация параметров во всём температурном диапазоне — смещения нуля, масштабного коэффициента, ошибок неортогональности и параметров, связанных с ускорением, что позволяет длительное время сохранять высокую точность измерений.


Серия комбинированных навигационных систем может быть сконфигурирована по программному и аппаратному обеспечению в соответствии с требованиями пользователя. В зависимости от особенностей некоторых навигационных применений гироскопы могут быть заменены на высокоточные, что позволяет максимально удовлетворить различные потребности пользователей.
| Волоконно-оптический гироскоп | |
| Диапазон измерений, °/s | ±300 |
| Смещение нуля, °/h | 0,01 |
| Стабильность нулевого смещения, °/h (10 с) | 0,01 |
| Нестабильность нулевого смещения, °/h (по Аллану) | 0,001 |
| Повторяемость нулевого смещения, °/h (6 включений) | 0,01 |
| Угловое случайное блуждание, °/√ч | 0,0005 |
| Нелинейность масштабного коэффициента, ppm | 10 |
| Асимметрия масштабного коэффициента, ppm | 10 |
| Повторяемость масштабного коэффициента, ppm | 10 |
| Перекрёстная связь, рад | ≤0,001 |
| Полоса пропускания, Гц | ≥200 |
| Кварцевый акселерометр | |
| Диапазон измерений, g | ±20 |
| Смещение нуля, мг (1σ) | ≤0,1 |
| Стабильность нулевого смещения, мкг (сглаживание 10 с) | 10 |
| Стабильность нулевого смещения, мкг (по Аллану) | 5 |
| Повторяемость нулевого смещения, мкг | 10 |
| Скоростное случайное блуждание, мм/с/√ч | 5 |
| Нелинейность масштабного коэффициента, ppm | 5 |
| Перекрёстная связь, рад | ≤0,001 |
| Полоса пропускания, Гц | ≥200 |
| Точность чисто инерциальной навигации | |
| Точность определения направления на север, ° (1σ) | 0,06 |
| Точность начальной выставки по горизонту, ° (1σ) | 0,005 |
| Точность удержания курса, °/h (1σ) | 0,06 |
| Точность удержания горизонтального положения, °/h (1σ) | 0,03 |
| Горизонтальная скорость, м/с (1σ) | <0,3 |
| Точность чисто инерциальной навигации (1σ) | <1 морская миля/ч |
| Точность измерения глубины, см | 5 |
| Точность комбинированной навигации с одометром | ≤0,002·D |
| Точность комбинированной навигации | |
| Точность курса (в реальном времени), ° (1σ) | 0,03 |
| Точность горизонтальной ориентации (в реальном времени), ° (1σ) | 0,01 |
| Точность курса (постобработка), ° (1σ) | 0,003 |
| Точность горизонтальной ориентации (постобработка), ° (1σ) | 0,001 |
| Горизонтальное положение, м (1σ) | 3 (одиночный режим), 0,02 + 1·ppm (RTK) |
| Вертикальное положение, м (1σ) | 5 (одиночный режим), 0,03 + 1·ppm (RTK) |
| Горизонтальная скорость, м/с (1σ) | 0,1 |
| Вертикальная скорость, м/с (1σ) | 0,15 |
| Спутниковый приёмник | |
| Точность синхронизации времени | 20 нс |
| Время определения местоположения | ≤40 с |
| Время запуска | ≤2 с |
| Частота обновления данных позиционирования | 10 Гц |
| Рабочая высота над уровнем моря | 10000 м |
| Спутниковые режимы | GPS: L1/L2/L5; BeiDou: B1/B2/B3; GLONASS: L1/L2 |
| Электрический/механический интерфейс | |
| Входное напряжение | 12–36 В пост. тока (рекомендуется 24 В) |
| Потребляемая мощность | ≤18 Вт |
| Габаритные размеры | 212 × 155 × 125 мм |
| Масса | ≤5 кг |
| Условия эксплуатации | |
| Рабочая температура | –40 ℃ ~ +70 ℃ |
| Температура хранения | –55 ℃ ~ +85 ℃ |
| Вибрация | 6 g, 20–2000 Гц |
| Ударная нагрузка | 100 g, 11 мс |
| Надёжность/эксплуатационная пригодность | |
| Средняя наработка на отказ / среднее время восстановления (MTBF/MTTR) | 10000 ч / 0,5 ч |
| Техническое обслуживание | Встроенный контроль (BIT) 95% |
Рисунок 1. Габаритные размеры волоконно-оптической бесплатформенной инерциальной/спутниковой комбинированной навигационной системы FSI400

Рисунок 2. Механический интерфейс спутниковой антенны волоконно-оптической бесплатформенной инерциальной/спутниковой комбинированной навигационной системы FSI400


связаться с нами
Сопутствующие популярные продукты

Высокоточная MEMS-комбинированная навигационная система MSI300
MSI300 MEMS-комбинированная навигационная система — это высокоточная, высоконадёжная и экономически эффективная MEMS-инерциальная комбинированная навигационная система, широко применяемая в навигации, управлении и измерениях на таких транспортных средствах, как автомобили, суда и беспилотные летательные аппараты.

Система трёхосевых испытаний волоконно-оптических катушек FCTS1310C/1550C
Система тестирования волоконно-оптических катушек — это трёхосевое высокоточное устройство для измерения смещения нуля гироскопа, которое может использоваться для оценки гироскопических характеристик волоконно-оптических катушек с рабочей длиной волны 1310 нм или 1550 нм.

Одноосевой волоконно-оптический гироскоп FS70
FS70 — это миниатюрный волоконно-оптический гироскоп, принципиально отличающийся от традиционных конструктивных решений. Он использует интегрированное проектирование оптических и электронных цепей, являясь идеальным выбором датчика угловой скорости средней и низкой точности для применения в области управления.

Поляризационно-сохраняющее волокно PMF для намотки катушек
В связи с тенденцией к миниатюризации волоконно-оптических гироскопов возникает необходимость использования поляризационно-сохраняющего волокна типа «Панда» с меньшим диаметром для намотки оптических катушек. Для удовлетворения потребностей заказчиков было разработано и изготовлено поляризационно-сохраняющее волокно малого диаметра с применением технологии тонкого покрытия, благодаря чему диаметр PMF уменьшен с 165 мкм до 135 мкм.

Двухосевой волоконно-оптический гироскоп F2X70
FS120H — это миниатюрный волоконно-оптический гироскоп, принципиально отличающийся от традиционных классических принципов проектирования. Он использует интегрированное проектирование электрических и оптических цепей, являясь идеальным выбором датчика угловой скорости средней и низкой точности для применения в области управления. Гироскоп широко применяется в различных областях инерциальных измерений и управления.

Устойчивый к высоким перегрузкам MEMS-инерциальный измерительный блок HG100A
HG100A оснащён трёхосевым гироскопом и трёхосевым акселерометром, которые измеряют угловую скорость, ускорение и температуру носителя.

Трёхосевой волоконно-оптический инерциальный измерительный блок F3X100
Волоконно-оптический гироскоп как новый тип полностью твердотельного гироскопа обладает такими преимуществами, как быстрый запуск, широкий диапазон измерений и высокая надёжность. Модель F3X100-IMU волоконно-оптического инерциального блока была разработана для применений средней и низкой точности. Устройство использует конструкцию с совместным использованием трёх осей, что обеспечивает низкую стоимость и стабильную производительность.

Одноосевой кремниевый гироскоп LKF-FS40 низкой и средней точности
Обзор продукта LKF-FS40 — это кремниевый фотонный гироскоп, который отходит от классической конце...

Кварцевый акселерометр
Кварцевый акселерометр — это высокопроизводительный одноосевой датчик с обратной связью по моменту силы. Он использует передовую кварцевую упругую конструкцию и сервотехнологию с замкнутым контуром, что позволяет точно измерять внешние ускорения и выдавать токовый сигнал, пропорциональный ускорению, с помощью высокоточной демодуляционной схемы.

Оптический приёмный модуль PIN-FET
PIN-FET является приёмным элементом оптического сигнала для волоконно-оптического гироскопа, одним из его оптических компонентов, играющим ключевую роль в обеспечении высокой чувствительности, низкого уровня шума и высокой надёжности.

Волоконно-оптическая инерциальная/спутниковая комбинированная навигационная система FSI301
FSI301 — это высоконадёжная и экономически эффективная волоконно-оптическая инерциальная/спутниковая комбинированная навигационная система, широко применяемая в таких областях, как высокоточная навигация наземных транспортных средств, беспилотных летательных аппаратов с длительным временем полёта и других.

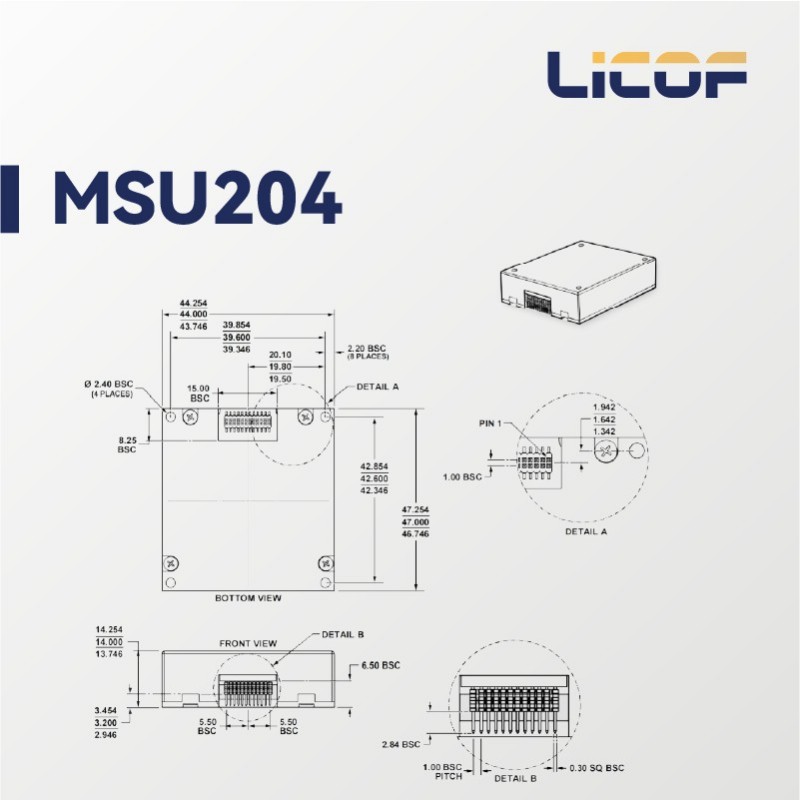
MSU104 Высокоточный инерциальный измерительный блок MEMS
Инерциальный измерительный модуль MSU104 MEMS – это высоконадежный и экономичный шестиосевой инерциальный измерительный модуль MEMS, который может широко использоваться в области навигации, управления и измерений, представленных транспортными средствами, кораблями, беспилотниками и т.д.

Система автоматического сопряжения Y-волновода
Данное устройство предназначено для сопряжения Y-волноводов и обеспечивает автоматическое сопряжение, автоматическое нанесение клея и автоматическое УФ-отверждение. Оператор вручную устанавливает Y-волноводный чип и трёхпортовый оптический компонент; в процессе сопряжения осуществляется ручное переключение тестового порта для измерения коэффициента экстинкции.

Оптический модуль волоконно-оптического гироскопа OM60/70/98/120
Оптический модуль волоконно-оптического гироскопа — это модульный компонент, специально разработанный для волоконно-оптического гироскопа и состоящий из волоконно-оптической катушки и MIOC (многофункциональный интегральный оптический чип). Волоконно-оптическая катушка и MIOC соединены вместе и интегрированы в одном корпусе.

Машина для намотки волоконно-оптических катушек серии RH
Машина для намотки волоконно-оптических катушек является ключевым оборудованием для изготовления волоконно-оптических катушек, используемых в гироскопах. Наша компания обладает собственными разработками и ключевыми технологиями в этой области.

Машина для перемотки оптического волокна FX02
Машина для перемотки оптического волокна предназначена для намотки волокна на заданную длину и повторной перемотки. Через интерфейс человек–машина оператор вводит целевую длину намотки, после чего машина автоматически выполняет намотку заданной длины и останавливается без участия человека, что обеспечивает автоматизацию производства и повышает эффективность.